
不用的东西学了总是会忘掉。我还是做点笔记吧。
废话
不得不说,课和课之间的差距真是不比人和人之间的差距小。
笔记
本文为学习Games 101过程中的随手笔记。很多内容之前各个来源了解过但欠缺系统连结和应用,慕名前来重修一遍。也因此笔记略过一些熟悉的内容,课程2倍速播放也记不了太多。
L2 线性代数回顾
没什么好说的。叉积用得实在不多印象模糊,记一些。
向量叉积
定义 & 性质
- 方向:右手定则
- 长度: $|a||b| \sin \theta$
- 交换律:$a \times b = - b \times a$
- 矩阵形式:
应用
- 判断左右,叉积结果为正 (个人理解为再对$(1, 1, 1)$做一次混合积) 在左
- 判断点是否在图形内:各边依次叉积,判断是否同左或同右(光栅化基础)
基向量
也没什么好说的。但有一个有意思的恒等式: $$ 对于一组标准正交基\vec{i}, \vec{j}, \vec{k} \\ \vec{p} = (\vec{p} \cdot \vec{i})\vec{i} + (\vec{p} \cdot \vec{j})\vec{j} + (\vec{p} \cdot \vec{k})\vec{k} $$
原理上是显然的:向量分别投影(内积)到各个基向量再乘以该基向量,最后加总组成原向量。但线性代数的证明没有想清楚。但对于任意维度,掰成解析几何用代数方法证明应该也是显然正确的。
L3 变换
放缩、反射略过,旋转后面说
Shear 切变 一维度不变 另一维度放缩比例与前一维度线性相关。横拉平行四边形。
以上均为线性变换
旋转矩阵
定义
$$ \begin{pmatrix} \cos{\theta} & -\sin{\theta}\\ \sin{\theta} & \cos{\theta} \end{pmatrix} $$性质
旋转矩阵$A$,是一个正交矩阵。这意味着$A^T = A^{-1}$。
正交矩阵
正交矩阵共有两类,旋转是其第一类,行列式为1;另一类行列式为-1。
正交矩阵是各个向量都互相正交,构成一组正交基的矩阵。由此产生的变换可以认为是转换正交基的一类变换。在这类变换中,坐标原点不变,向量长度不变;你也可以说各点之间的欧氏距离不变。正交变换
直接正交矩阵直接放向量左乘即可变换到该组正交基。 $$ 将任意正交矩阵A表达为 \begin{pmatrix} \vec{i} \\ \vec{j} \\ \vec{k} \end{pmatrix} ,则A \vec{x} = \begin{pmatrix} \vec{i} \cdot \vec{x} \\ \vec{j} \cdot \vec{x} \\ \vec{k} \cdot \vec{x} \end{pmatrix} $$
这熟悉的内积投影,同理于之前基向量一节所提到的公式。
应用
由于正交矩阵的性质,当求旋转矩阵不好求时,可以先求逆矩阵后做转置。
齐次坐标 Homogeneous Coordinates
动机
事实上齐次坐标的引入还见过其他更多的解释和优势,比如表示无穷远点,符合透视原则等,但想不全了。这里只介绍了一个主要原因:统一平移变换。
设计
增加一个维度:
- 向量: $(x, y, 0)$
- 点: $(x, y, 1)$
平移表示为 $$ \begin{pmatrix} 0 & 0 & t_x\\ 0 & 0 & t_y\\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} x\\ y\\ 1 \end{pmatrix} $$
从而有:
- 向量+向量=向量
- 点-点=向量
- 点+向量=点
- 点+点=中点
对于点$(x, y, w)$,其与$(x/w, y/w, 1)$表示同一个点。
仿射变换 Affine Transformations
词源
中文似乎是胡逼音译过来的……英文中代表很像,与congruency, similarity成递进关系,转换前后空间中保持平行关系,距离保持比例关系。
定义
线性变换+平移
L4 三维变换
视图/相机变换 View/Camera Transformation
事实上就是求一个ModelView Transformation Matrix。
习惯上把摄像机放在坐标原点,指向-z方向,顶端指向y方向,由此三个约束唯一确定摄像机姿态。同时将世界中的物体依同样变换转移坐标系。
变换组合为$R T$,即先平移到坐标原点,再进行旋转(左乘规则,右侧T先被计算)。平移简单,齐次第四列加上平移差量即可。旋转时先考虑逆变换:目标空间中单位基向量经过怎样的变换$R^T = R^{-1}$到当下空间中的基向量。
$$ Current base: (\vec{g \times t}, \vec{g}, \vec{t})^T \\ Target \vec{x} = (1, 0, 0)^T, so the first column is (x_{\hat{g} \times \hat{t}}, y_{\hat{g} \times \hat{t}}, z_{\hat{g} \times \hat{t}})^T $$然后再求个逆得到 $$ \begin{pmatrix} x_{\hat{g} \times \hat{t}} & y_{\hat{g} \times \hat{t}} & z_{\hat{g} \times \hat{t}} \\ x_t & y_t & z_t \\ x_{-g} & y_{-g} & z_{-g} \end{pmatrix} $$
个人理解倒也不必这么麻烦。根据前面正交变换这里的理解,要想转换单位正交基到一组新的正交基, 直接左乘一个由新正交基构成行向量的正交矩阵就可以了,这样可以直接得出所需的$R$。
由此,我们得到了MV矩阵。
投影变换 Projection Transformation
正交投影 Orthographic Projection
- 简单的理解
- 摄像机仍然这么摆放
- 丢弃Z轴
- 平移并缩放到$[-1, 1]^2$平面
- 图形学操作
定义标准立方体,将$[l, r] \times [b, t] \times [f, n]$映射到标准(canonical)立方体$[-1, 1]^3$- 注意到由于右手坐标系,我们沿-z方向观察,因此远(far)的z值更小,处于闭区间左端
因此OpenGL等使用左手系,使得far > near更直观
- 很显然的,我们得到以下变换矩阵(先平移(右侧),再缩放(左侧))(不过先缩放好像也未尝不可?平移矩阵变成一个常量)
$$ M_{ortho} = \begin{pmatrix} \frac{2}{r-l}&0&0&0\\ 0&\frac{2}{t-b}&0&0\\ 0&0&\frac{2}{n-f}&0\\ 0&0&0&1 \end{pmatrix} \begin{pmatrix} 0&0&0&-\frac{r+l}{2}\\ 0&0&0&-\frac{t+b}{2}\\ 0&0&0&-\frac{n+f}{2}\\ 0&0&0&1 \end{pmatrix} $$
- 注意到由于右手坐标系,我们沿-z方向观察,因此远(far)的z值更小,处于闭区间左端
透视投影 Perspective Projection
尝试将棱台frustrum *(但愿我没拼错)*通过线性变换挤压成长方体,再应用正交投影。
首先通过切面的相似三角形,可以得到x, y的缩放系数为$n/z$。即任意一齐次坐标$(x, y, z, 1)$应用挤压变换后映射到$(nx, ny, ?, z)$。显然该矩阵有以下形式:
$$ \begin{pmatrix} n&0&0&0\\ 0&n&0&0\\ ?&?&?&?\\ 0&0&1&0 \end{pmatrix} $$注意到以下两种特殊解/约束条件:
- 近平面上所有点映射到自身
- 远平面上所有点映射到相同平面上,且中心点映射到自身
可以得到所要求的变换矩阵为 $$ M_{perspective2ortho} = \begin{pmatrix} n&0&0&0\\ 0&n&0&0\\ 0&0&n+f&-nf\\ 0&0&1&0 \end{pmatrix} $$
则完整变换 $$ M_{projection} = M_{orthographic}M_{perspective2ortho} $$
思考问题
远近平面深度不变,那么之间的点呢?
应该是变远了(更接近远平面)。尝试证明如下:
对于其中任意一点$(x, y, z, 1)$,变换后坐标为$(nx, ny, (n+f)z-nf, z)$,深度值为$n+f-\frac{nf}{z}$。
$$ z - (n+f-\frac{nf}{z}) = z + \frac{nf}{z} - (n+f),\ z \in [f, n] \\ \because z + \frac{nf}{z} \text{is convex with a minimum value}\ 2 \sqrt{nf}, \text{maximum value}\ n+f\\ \therefore z \le n+f-\frac{nf}{z} \ \blacksquare $$但我很好奇这到底是怎么样的一个变换,拿Python简单画了个图。[10, 100],等距蓝色直线经过变换后到红色。还是挺大的一个挤压。
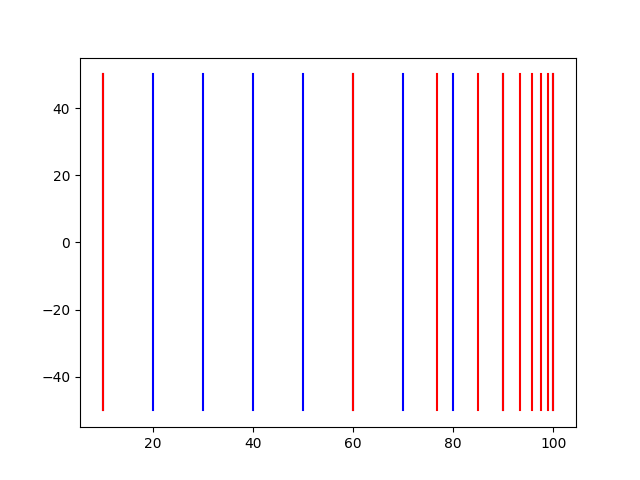
原本想象的是Z不变。尝试写一个期望的Z不变的变换矩阵发现不太行。由于x, y压缩时带入了z变量,导致要保证这矩阵是齐次的话z也要带入一个1/z的系数,从而变换矩阵只能唯一是我们求到的这个。所以约束条件可以多一个:变换矩阵得是齐次的。
L5 光栅化(三角形) Rasterization (Triangles)
视口变换
保持z不变,x,y扩展到视口大小。$[-1,1]^2$到$[0, width] \times [0, height]$。
视口变换矩阵: $$ M_{viewport} = TS = \begin{pmatrix} \frac{width}{2} &0&0&\frac{width}{2}\\ 0&\frac{height}{2}&0&\frac{height}{2}\\ 0&0&1&0\\ 0&0&0&1 \end{pmatrix} $$
三角形
使用三角形作为片元的优点:
- 保证同一平面
- 易插值
- 方便判断内部
光栅化
光栅化本质是使用inside函数(判断点是否在三角形内)在屏幕空间进行采样。 还是上次说的使用外积判断点是否在内部。
对于每一个图形通过取包围盒减少计算量。简易片元包围盒取三个顶点的$x_{min}, y_{min}, x_{max}, y_{max}$组成矩形四个顶点。
反锯齿(Anti-aliasing)是一个重要问题。
L6 光栅化(抗锯齿和Z-buffering) Rasterization (Antialiasing and Z-Buffering)
抗锯齿
采样是图形学常见(Ubiquitous)概念。同样走样(Aliasing)也是。采样误差被称为Sampling Artifacts。
- 锯齿 (Jaggies):空间采样误差
- 摩尔纹 (Moire):图像欠采样
- 电风扇倒转 (Wagon wheel effect):时间采样误差
- …
原因:高频信号采样频率不够
抗锯齿采样
模糊预处理(低通滤波),过滤掉奈奎斯特 (Nyquist) 极限以上的信号。
图像高频信息通常表达边界,低频缺少细节。
傅里叶变换
时域的卷积 = 频域的乘积 时域的乘积 = 频域的卷积
采样 = 冲激函数 * 原始函数
因此在频域上采样 = 冲激函数频率 卷积 原始函数频域
因此采样在频域就是重复原始信号频谱。
抗锯齿方法
- 增加采样率(增大分辨率) 不太行(硬件改动)
- 过滤高频信号 行!
MSAA Multi Sampling AA
像素内超采样,取平均值。超采样得到近似三角形覆盖,实现模糊步骤。成倍增加计算量。
FXAA Fast Approximate AA
找出锯齿边界并替换。
TAA Temporal AA
复用上一帧信息。
L7 着色(光照,着色和渲染管线) Shading (Illumination, Shading and Render Pipelne)
接上节未完成的深度测试。
深度测试
画家算法
从远到近覆盖绘制。存在不可解的深度关系,如三个物体互相交错。
深度缓存
正想问MSAA的深度缓存怎么做,没想到是作业。待会儿看一下。猜一下是把深度缓存扩大到超采样点,之后计算覆盖值应该在最后一步。想想都觉得很合理,接近的两个超像素会混合颜色。emm~满意。
透明物体不参与Z-Buffering。
着色
Blinn-Phong Reflectence
模型定义光照 = 高光 (Specular) + 漫反射 (Diffuse) + 环境光 (Ambient)
着色是局部 (local) 的。只考虑本身,不考虑其它元素(阴影)。
有以下4个属性:
- 入光方向$l$
- 法向量$n$
- 视线方向$v$
- 其他属性(shiness, color ,…)
漫反射
- Lambert cosine law
能量守恒看,光方向与片元面法向量夹角决定片元收到的能量强度 - Light falloff
能量守恒看,点光源辐射能量强度与距离平方反比(类比电磁场/引力)
漫反射与观察角度无关。
L8 着色(着色,管线和纹理映射) Shading (Shading, Pipeline and Texture Mapping)
继续Blinn-Phong模型
着色
Blinn-Phong Reflectence Cont.
高光
越接近出射光方向越亮。做一个减少计算量的优化:v越接近出射光方向同时也意味着v与l的 半程向量 h越接近法线n。h所需计算量比出射光小。 $$ \vec{h} = \frac{\vec{l} + \vec{v}}{|\vec{l} + \vec{v}|} $$
$$ L_s = k_s \frac{I}{r^2} \max(0, \hat{n} \hat{h})^p $$指数$p$使得cosine函数更陡峭,高光反射范围更窄。高光一般取白色。
环境光
$$ L_a = k_a I_a $$加总
$$ L = L_a + L_s + L_d $$着色频率
- flat shading: 对每个三角形求法线并统一着色
- Gouraud shading: 对顶点着色并插值
- Phong shading: 插值法线向量并对每个像素着色 (与光照模型不是同一概念)
当面数增大时,他们之间是一个trade-off。面数超过像素数,或许Phong shading更省资源。
顶点法线
周围面法线(加权)求平均。
像素法线
顶点法线插值。
实时渲染管线
- 输入:三维空间顶点
- 顶点处理:投影到屏幕空间
- 三角形处理:形成三角形
- 光栅化:形成离散片元
- 片元(Fragment)处理:着色片元
- 帧缓存操作:输出到屏幕
顶点、片元可编程。除此外出现更多的可编程shader比如geometory(可增加三角形)、computing(通用计算)。
纹理映射
几何参数化问题(none of our business)
L9 着色(纹理映射) Shading (Texture Mapping cont.)
纹理映射
重心坐标 Barycentric Coordinates
一种三角形的坐标系统
三角形ABC中,任意点$(x,y)$可以表示为$\alpha A + \beta B + \gamma C$,其中$\alpha + \beta + \gamma = 1$。对于三角形内任一点,三个参数非负。
参数计算可以使用三角形面积比。(叉积)
重心坐标在投影中并不是不变的。因此三维空间插值应在三维空间中完成后再投影。
纹理放大 Texture Magnification
- 最近邻
- 双线性插值 Bilinear Interpolation: xy方向最近四个texel简单线性插值
- 双立方插值 Bicubic:最近16个texel线性插值
纹理过大
Mipmap
生成分辨率 1/4的多个纹理,额外占1/3空间
- 三线性插值 +层与层之间插值
各向异性过滤 Anisotropic Filtering
Ripmap解决矩形区域采样问题,但更多异形无法解决(如斜着采样),可借助EWA等花费更多代价解决。
L10 几何 Geometry (Introduction)
纹理映射 cont.
其他应用
- 环境光照 球状贴图 -> cubic map
- 法线贴图: 计算相邻贴图位置高度差,新向量垂直于计算得到的梯度
- 位移贴图 Displacement mapping:真实移动顶点,不会在边缘/阴影露馅
要求三角形定义比纹理更细。可联合动态细分 Dynamic tasellation应用。
几何
- 隐式几何:使用点满足的关系表示几何
包括解析式、距离函数(可以由离散grid-stored value表示) - 显示几何:通过直接给出点或使用参数映射 *(parameter mapping)*的方式
With a mapping and function $f: \mathbb{R}^2 \rightarrow \mathbb{R}^3; (u,v)\mapsto (x,y,z)$
隐式几何
- 优点:
- 紧实(compact)的表示
- 特定查询方便(内部性判断、到表面距离)
- 易于线面相交计算
- 简单形体无采样误差
- 易于处理拓扑变换
- 缺点:
- 不易描述复杂形体
L11 几何(曲线和面) Geometry (Curves and Surfaces)
显式几何
- 点云
- 多边形 meshes
- 参数映射 贝塞尔曲线
贝塞尔曲线 Bezier Curves
性质
- 端点插值
- Tagent to end segments
- 仿射变换特性:变换后的曲线与仿射变换后的控制点的到的贝塞尔曲线一致
- 曲线在控制点所在的凸包 (convex hull) 内
日常应用中常用四个控制点(钢笔工具)多个分段曲线组成长段光滑曲线。对齐连接点控制点共线并等长距离可做到C0光滑(一阶导数一致)
样条 spline
一条穿过各个控制点的曲线
B(basis)-splines
- 相比贝塞尔曲线需要更多信息
- 满足所有贝塞尔曲线性质,是其超集
- 局部性
较为复杂,不为展开。另有非均匀有理B样条(NURBS)。同时曲线操作也不为展开。
相关展开内容可以参考Prof. Shi-Min Hu’s course。
贝塞尔曲面
二维下如同双线性插值,一个方向上的控制点定义了一组平行贝塞尔曲线;再对平行贝塞尔曲线在另一个方向上取值认为是一组最终控制点,定义了在另一个方向上连续的一组贝塞尔曲线,从而组成曲面。
我猜测维度方向的选择应该和最终结果无关。但不是很想证明。本质上贝塞尔曲线是多次线性插值的结果,这个性质应该是符合直觉的。
面操作
- 面细分 subdivision
- 面简化 simplification
- 面正规化 regularization
L12 几何 Geometry
首先骄傲了下CG第二次获得图灵奖,并炫耀了一下“科研族谱” (What’s that?!) 获得图灵奖的是Prof. Yan握过手的师爷 (还是值得骄傲的恭喜恭喜。这么算我祖师爷拿了图灵奖,与有荣焉🤪)
面细分
Loop Subdivision (三角形面)
- 连接三角形各边中点得到细分三角形。
- 新顶点位置 = 3/8 两近顶点位置 + 1/8 两远顶点位置
- 旧顶点位置更新 = (1 - n*u)本顶点原位置 + u邻居顶点位置和,n为顶点的度,u = n==3 ? 3/16 : 3/(8n)
Catmull-Clark Subdivision (General Mesh)
不要求全是三角形面。
奇异点(Extrodinary Points)指度不为4的顶点。 对每个非四边形面,取面上中点,连接周围边上中点。其余连接边上中点。经过一次细分后会产生非四边形面数量的奇异点。此后所有面变为四边形面。
面上的点:$f = \frac{v_1+v_2+v_3+v_4}{4}$
边上的点:$f = \frac{v_1+v_2+f_1+f_2}{4}$
原先顶点:$v = \frac{f_1+f_2+f_3+f_4+2(m_1+m_2+m_3+m_4)+4p}{16}$
面简化
Collapsing edges
边坍缩。将一条边去除,连接两端顶点。
误差度量:二次误差
最小化新点到原先各个面的距离平方和。
边选择
对所有边求二次误差最优值,依次选择最小误差边进行坍缩。(Garland & Heckbert 1997)
动态更新局部受坍缩影响的点。堆。
Shadow Mapping
对点光源而言,不在阴影中的点 = 能被摄像机看到 && 能被点光源看到。(传统阴影映射只能处理点光源)
- 从光源看向场景,记录深度
- 从摄像机看向场景,对每个点投影回光源记录的平面,检测光源深度缓存是否与当前深度一致
问题:
- 硬阴影only(点光源)
- 质量依赖shadow map分辨率
- 引入浮点数相等比较带来的精度问题
软阴影
是由于光源存在大小而非点光源引起
L13 光线追踪 Ray Tracing
假设
- 光沿直线传播
- 光不会碰撞
- 光从光源到眼睛(但光路是可逆的 (reciprocity) )
Whitted-Style Ray Tracing
从视点发射光线,递归。每次碰撞判断交点与光源可见性,求着色。
Ray-Surface Intersection
Ray Equation
$$ r(t) = o + t\vec{d}, 0 \le t \le \inf $$隐式表示求交
代入函数求解。发达的数值方法不用担心求不出来。
显示表示求交 (三角形面)
对每个三角形求交?(加速方法卖个关子之后再讲)
求交方法
分解成两步
- 与三角形所在平面求交点
- 判断交点是否在三角形内
平面法线$N$,任意一点$p^{\prime}$,平面点法式$(p-p^{\prime})\cdot N = 0$。带入射线方程解得
$$ t = \frac{(p^{\prime} - o) \cdot N}{d \cdot N},\ t \in [0, \inf) $$Molller Trumbore Algorithm
更快的方法。利用重心坐标解以下线性方程组:
$$ O+tD = (1-b_1-b_2)P_0+b_1 P_1 + b_2 P_2 $$得到重心坐标后可以立刻判断是否在三角形内。
求交加速
包围体积 Bounding Volumn
三维长方体包围盒:认为由三对平行平面(pairs of slabs)组成的交集(轴对齐包围盒(Axis-Aligned Bounding Box (AABB)))
对每一组对面都求一个进入时间和离开时间。光线在盒子内的时间为$[\max(t_{enter}), \min(t_{exit})]$。
有以下特殊情况需要处理:
- $t_{exit} \lt 0$:盒子在后面,无交点
- $t_{exit} \ge 0, t_{enter} \lt 0$:在盒子内
当且仅当$t_{enter} \lt t_{exit}, t_{exit} \ge 0$时有交点。
平行于轴的光线怎么办?
L14 光线追踪 Ray Tracing
求交加速 cont.
网格法 Uniform Grids
将场景划分为网格组成包围盒指示内部是否存在物体边界。
空间划分 Spatial Partition
- 八叉树 Oct-Tree
- KD-Tree
- BSP-Tree
KD-Tree is preferred. 但由于多边形求交困难,渐渐不用。一个物体同时可能存在多个盒子内。
物体划分 Object Partition & Bounding Volume Hierarchy (BVH)
将集合中物体分成两份(按空间划分)各自计算包围盒。启发式延长轴划分。启发式按中间位置物体划分。寻找中位数是一个O(n)算法。改一改快排就行了。
伪代码
void intersect(Ray ray, BVH node) {
if (ray misses node.bbox) return;
if (node is a leaf node) {
test all objs;
return closest intersection;
}
hit1 = intersect(ray, node.child1);
hit2 = intersect(ray, node.child2);
reuturn closer of hit1, hit2;
}
辐射度量学 Basic Radiometry
学物理可太快乐了
光的空间属性
- radiant flux 辐射通量
- intensity 辐射强度
- irradiance
- radiance
Radiant Energy and Flux (Power)
- energe Q in J(oule)
- flux (power) $\Phi \equiv \frac{dQ}{dt}$ in W(att) / lm (lumen)
Important Light Measurements of Interest
- light emitted from a source: radiant intesity
- light falling on a surface: irradiance
- light traveling along a ray: radiance
Radiant Intensity
power per unit solid angle(立体角): $I(\omega) \equiv \frac{d \Phi}{d \omega}$ in candela, W or lm divided by solid angle.
坎德拉是基本单位之一,代表光亮度,光亮度与能量不是同一概念。可能是借用?
Solid Angle
立体角度对应球面面积除以半径平方. 球面立体角4pi.
$$ dA = (rd \theta)(r \sin \theta d \phi) = r^2 \sin \theta d \theta d \phi \\ d \omega = \frac{dA}{r^2} = \sin \theta d \theta d \phi $$$\theta$作为纵向角,$\phi$作为横向角,两者定义方向向量$\omega$。
各向同性点光源 Isotroppic Point Source
$$ \Phi = \int_{S^2} Id \omega = 4\pi I \\ I = \frac{\Phi}{4\pi} $$L15 光线追踪 Ray Tracing
Irradiance
Power per unit area. 光线垂直打到表面上。
$$ E(x) = \frac{d\Phi(x)}{dA} $$ 单位lux(lm/m^2)
Radiance
Power emitted/reflected/transmitted/received by a surface, per unit solid angle, per projected unit area. 理解为单位面积朝单位立体角辐射/被辐射的能量(此处指功率,下同)
$$ L(p, \omega) \equiv \frac{d^2\Phi(p, \omega)}{d\omega dA\cos\theta} $$单位nit(cd/m^2)
Bidirectional Reflectance Distribution Function (BRDF)
表示从每个入射角反射到每个出射角的光线量
$$ f_r(\omega_i \rightarrow \omega_r) = \frac{dL_r(\omega_r)}{dE_i(\omega_i)} = \frac{dL_r(\omega_r)}{L_i(\omega_i)\cos\theta_id\omega_i} $$单位1/sr。个人理解可以理解为对于一个出射方向能量,各个入射方向的贡献分布。
反射方程 Reflection Equation
对于特定观察方向(出射角),辐射光量为
$$ L_r(p, \omega_r) = \int_{H^2}f_r(p, \omega_i\rightarrow\omega_r)L_i(p, \omega_i)\cos\theta_id\omega_i $$这个方程是递归求解的。麻烦。
渲染方程 Rendering Equation
增加一个发射光量。得到
$$ L_o(p, \omega_r) = L_e(p, \omega_o) + \int_{\Omega^+}L_i(p, \omega_i)f_r(p, \omega_i, \omega_o)(n\cdot\omega_i)d\omega_i $$即渲染方程。
已知发射intensity,BRDF,入射角度,可以将式子简写为
$$ \begin{aligned} I(u) &= e(u) + \int I(v)K(u,v)dv \\ \implies L &= E + KL \end{aligned} $$其中K为equation kernel,Light Transport Operator。这是一个经典形式的第二类Fredholm积分方程:有良好的数值解。
艹,接下来开始不明所以但很有道理的……泛函分析?PDE?还是基于什么别的东西的推导。函数当矩阵算好爽啊。以及一个二项展开。这级数收敛性……据说是收敛的。
$$ \begin{aligned} L&=E+KL\\ IL-KL&=E\\ (I-K)L&=E\\ L&=(I-K)^{-1}E\\ L&=(I+K+K^2+K^3+\ldots)E\\ L&=E+KE+K^2E+K^3E+\ldots \end{aligned} $$我们得到了一个级数。第一项为光源直射,第二项为直接光照,第三项为弹射一次的间接光照,之后为更多次的间接光照。作为经典光栅化着色,我们得到的是光源直射和直接光照的近似(近似到前两项)。
概率论回顾
概率论还没忘那么多,不多回顾了
$$ X \sim p(x)\\ Y = f(X) \\ E[Y] = E[f(X)] = \int f(x)p(x)dx $$L16 光线追踪(蒙特卡洛路径追踪) Ray Tracing (Monte Carlo Path Tracing)
蒙特卡洛积分 MC
对$\int f(x)dx$的求解可以通过抽样近似。设抽样随机变量$X \sim p(x)$,则
$$ \int f(x)dx \approx \frac{1}{N}\sum^N_{i=1}\frac{f(x_i)}{p(x_i)} $$路径追踪 Path Tracing
从而我们可以通过MC解渲染方程。对于表面以上各方向入射光线积分,每次随机选择n个方向求均值。理论完备,但实现中有以下问题:
- MC采样数指数上升
- 递归求解没有递归终点
- 采样数减少导致结果噪点较大
路径追踪优化
对于采样数指数上升问题,将采样数限定为1可避免增长。进行多次Tracing求均值。
递归终点若简单限制步长会造成能量损失。通过“俄罗斯轮盘赌”方法每次以一定概率结束采样,同时对接受的采样除以概率p,可使得最终能量的期望仍守恒。
在有限的采样数内,若使用均匀采样会有较多的结果miss直接光照,样本无效率较高。提高采样效率,通过选取另一种MC采样分布实现。
采样分为光源采样及间接光照采样。光源通过将积分微元从$dw_i$转换到$dA$,即选取有效物体表面进行采样,规避无效采样。微元间有以下关系($dA$乘以$\cos\theta^\prime$得到平行于反射面面积,剩余部分相似三角形易证)
其中$\theta^\prime$为入射光线(光源的出射光线)相对于光源平面法线的角度。
间接光照维持球面随机采样,轮盘赌结束递归的方式。
采样微元转换到光源平面后,需要解决光源是否被遮挡问题。从着色点cast ray到光源微元点,看是否被遮挡。
路径追踪结束。
路径追踪处理点光源上有点麻烦。大概是点光源没有面积的原因,采样受到了干扰。这是点光源的问题🐶 考虑做成小面积光源。
路径追踪的一些Topic
- 重要性采样:MC采样分布的优化
- 多重重要性采样:结合半球采样与光源采样
- 像素重建滤镜:像素radiance不必是所有穿过它的路径的均值
- 伽马矫正/色彩空间:像素的radiance不必是像素的颜色
- 抽样方法的选择
- 随机数的选择:low discrepancy sequences
- 除路径追踪外的其他方法:
- 光子映射 photon mapping
- 双向路径追踪
- Metropolis light transport
- VCM / UPBP
- …
他保证难的都过去了。这个梯度可真好。可能老师期望不是很高吧hhhh
L17 材质与外观 Materials and Appearances
Material = BRDF
漫反射材质 Diffuse/Lambertian Material
假设入射光线是均匀的,在各个方向上都是常数
这个假设其实没有很确信起因。模型上来讲只能说因为漫反射出射光与入射光无关,因此做这么个假设简化计算。但如此BRDF分布就被大大简化了……不过确实变得可解了。
本来一直好奇BRDF这么个复杂的二维概率分布该怎么实现,所以BRDF最后还是会退化么。
$$
\begin{aligned}
L_o(\omega_o) &= \int_{H^2}f_rL_i(\omega_i)\cos\theta_id\omega_i \\
&= f_rL_i\int_{H^2}\cos\theta_id\omega_i \\
&= \pi f_rL_i
\end{aligned}
$$
可知$f_r = \frac{1}{\pi}$时能量守恒,完全反射入射光。定义$f_r = \frac{\rho}{\pi}$,$\rho$为反射率(albedo(color)),在0到1之间。
完全镜面反射 Perfect Specular Reflection
平行四边形法则得出射角,方位角180度。
折射 Refraction
斯涅耳定律
$\eta_i\sin\theta_i = \eta_t\sin\theta_t$ $$ \begin{aligned} \eta_i\sin\theta_i &= \eta_t\sin\theta_t \\ \cos\theta_t &= \sqrt{1 - \sin^2\theta_t} \\ &= \sqrt{1-(\frac{\eta_i}{\eta_t})^2\sin^2\theta_i} \\ &= \sqrt{1-(\frac{\eta_i}{\eta_t})^2(1 - \cos^2\theta_i)} \\ \\ 1-(\frac{\eta_i}{\eta_t})^2(1 - \cos^2\theta_i) \ge 0 \end{aligned} $$
菲涅尔项 Fresnel Term
反射性和法线夹角、光线极化有关。法线夹角越大,反射性越强,反射能量越多。(玻璃越斜看越不透明)
导体绝缘体菲涅尔项不同。
$$ R_s = \left|\frac{n_1\cos\theta_i-n_2\cos\theta_t}{n_1\cos\theta_i+n_2\cos\theta_t}\right|^2 \\ R_p = \left|\frac{n_1\cos\theta_t-n_2\cos\theta_i}{n_1\cos\theta_t+n_2\cos\theta_i}\right|^2 \\ R_{eff} = \frac{R_s+R_p}{2} $$Schlick’s approximation
$$ R(\theta) = R_0 + (1-R_0)(1-\cos\theta)^5 \\ R_0 = (\frac{n_1-n_2}{n_1+n_2})^2 $$微表面模型 Microfacet Material
近处是几何,远处是材质。使用微表面材质得法线分布来定义材质。glossy法线分布相对集中,diffuse法线分布相对分散。
$$ f(i,o) = \frac{F(i,h)G(i,o,h)D(h)}{4(n,i)(n,o)} $$ F为菲涅尔项,G为自阴影项(shadowing-masking term),D为法线分布。平射光线(掠射角度Grazing Angle)更容易被自阴影挡住。
各向同性/异性材质 Isotropic/Anisotropic Materials (BRDFs)
没说怎么模拟解决,只提了几个case。
BRDF的若干性质
- 非负性
- 线性:指线性可加,可分为不同部分分别计算后相加(Blinn-Phong的正确性来源)
- 可逆性:交换入射出射方向,数值完全一致
- 能量守恒:BRDF给定出射角,对所有入射角积分,值小于等于1:保证了光追收敛
- 各向同性与各项异性
- 各向同性中$f_r(\theta_i,\phi_i;\theta_r,\phi_r) = f_r(\theta_i,\theta_r,\phi_r-\phi_i)$,四维降为三维函数
- 由可逆性可知
$f_r(\theta_i,\theta_r,\phi_r-\phi_i)=f_r(\theta_r,\theta_i,\phi_i-\phi_r)=f_r(\theta_i,\theta_r,|\phi_r-\phi_i|)$
测量BRDF
- Image-based: Gonioreflectometer / spherical gantry
- 材质存储:耗空间大。MERF BRDF Database可供参考。存储压缩是一个时兴话题。
L18 高阶渲染话题 Advanced Topics in Rendering
高级光线传播 Advanced Light Transport
- 无偏光线传播方式 Unbiased light transport methods
- Bidirectional path tracing (BDPT)
- Metropilis light transport (MLT) named after inventor
- 有偏光线传播 Biased light transport methods
- Photon mapping 光子映射
- Vertex connection and merging (VCM) 光子映射+双向路径追踪
- Instant radiosity 实时辐射度 (VPL/ many light methods)
Biased vs. Unbiased Monte Carlo Estimators
- 无偏(Unbiased)估计期望值始终等于真实值,无系统性误差
- 否则有偏(Biased)
- 当期望值随样本数增多收敛到真实值,则它是一致的(Consistent)
双向路径追踪 (BDPT)
从光源与摄像机分别进行子路径追踪。
- 如果在光源处光线路径复杂,则效果较好
- 难以实现,速度慢
Metropolis Light Transport
- 使用马尔科夫链(MCMC)进行采样
- 以一定概率分布从当前采样点寻找到下一个采样点
- 擅长局部探索一些困难的光路
- 关键思想
- 局部扰动一条现存的路径以获得新的路径
- 优点
- 适合解决复杂光路 (e.g. caustics)
- 无偏
- 缺点
- 难以估计收敛率
- 不保证每个像素有相同的收敛率
- 常常产生“脏的”结果
- 不常被使用于动画渲染
Photon Mapping 光子映射
- 有偏方法 & 两步方法
- 非常善于处理Specular-Diffuse-Specular(SDS)路径并产生焦散(caustics)
大致框架:
- 光子追踪 photon tracing
从光源发射光子,弹射,记录光子最后落在的diffuse表面 - 光子收集 photon collection
从摄像机发射子路径,弹射,直到击中diffuse表面 - 计算局部密度估计 (local density estimation)
- 思想:拥有越多光子的区域越亮
- 对每个着色点,寻找最近N个光子,取其覆盖面积,计算密度
- 如:最近着色点取包围球,求球体在着色面上的相交面积
有偏的原因
局部密度估计中$dN/dA \neq \Delta N/\Delta A$
当光子无限多时,以上估计收敛到真实值。因此本方法一致(Consitent)。
渲染中一般来说
- 有偏方法产生模糊的结果
- 一致方法在样本数无穷大时变得清晰
当使用固定大小区域估计光子密度时,由于$dA$永远不会变小,因此将永远是一个有偏估计,并且不一致。
VCM
结合双向路径追踪和光子映射
- 关键思想
- 不浪费双向光追中的子路径当追踪终点无法被连接但可以被融合时(指在一个面上邻近)
- 使用光子映射来融合邻近光子
电影行业运用广泛
Instant Radiosity
- 有时被称为many-light方法
- 关键思想
- 被照亮的表面可以被认为是光源
- 方法
- 发射子光路并认为每条光路的终点都是一个虚拟点光源 (Virtual Point Light)
- 使用虚拟点光源渲染场景
- 优点
- 速度快,在漫反射表面有不错的效果
- 缺点
- 当虚拟点光源接近着色点时会有spikes(异常发光)出现
- 类比直接光源采样,对立体角的采样转化为对光源面积采样除以距离。当距离平方项极小,结果被异常放大。
- 无法处理光滑(glossy)物体
- 当虚拟点光源接近着色点时会有spikes(异常发光)出现
高阶外观建模 Advanced Appearance Modeling
- 非表面模型 Non-surface models
- 散射介质 Participating media
- 毛发纤维 (BCSDF)
- 颗粒材质 Granular material
- 表面模型 Surface models
- 半透明材质 Translucent material (BSSRDF)
- 布料 Cloth
- 细节材质 Detailed material (non-statistical BRDF)
- 生成外观 (Procedral appearance)
散射介质
- 光线穿过散射介质中的任何时候,它都会(部分)被吸收和散射
- 使用相位函数(Phase Function) 来描述在散射介质中任意点光线在各个角度上的散射分布
散射介质渲染方法
- 随机选择弹射方向
- 随机选择直射距离
- 在每一个着色点,连接光源
毛发
有两种高光
Kajiya-Kay 模型
考虑了圆柱体近似下一定角度的散射+漫反射
Marschner 模型
将光线分为三部分
- 圆柱体直接反射R
- 穿入头发再穿出TT
- 穿入头发,内部反射后再返回穿出TRT
头发建模为玻璃样圆柱,外层cuticle,内层cortex。
结果真实。多次反射效果很好。计算量大。
双圆柱模型 Double Cylinder Model (Yan model)
听闫老师讲自己的work。(其实对我感觉人毛发模型用动物上去还是蛮可以接受的了,就是那示例狼脑袋黑了点)
新增一个毛发髓质(Medulla)的研究。髓质散射光线。动物毛发相比人有更大的髓质。
相比M模型,新增两个光线分类:原先穿过头发的两类光线受髓质影响新增TRTs & TTs。
猩球崛起和狮子王都有采用该毛发模型。均获得奥斯卡最佳视觉效果提名。
颗粒模型
分颗粒成分比例进行渲染。没有得到很好的解决。
表面模型 半透明材质
E.g. 玉石、水母。
次表面反射 Subsurface Scattering
Scattering Functions
BSSRDF: BRDF的延申;一点出射光线受另一点入射光线影响$S(x_i, \omega_i, x_o, \omega_o)$
渲染方程的泛化:对表面的所有点和所有方向积分 $$ L(x_o, \omega_o) = \int_A\int_{H^2}S(x_i,\omega_i,x_o,\omega_o)L_i(x_i,\omega_i)\cos\theta_id\omega_idA $$
Dipole Approximation
近似方法:通过引入两个点光源来近似次表面反射。
适合皮肤渲染。
布料
- 缠绕纤维的集合
- 两级缠绕
- 纤维(Fiber)缠绕成股(Ply)
- 股缠绕成线(Yarn)
- 线被纺(Woven)或织(Knitted)成不同布料。
- 给定纺织pattern,计算整体behavior
使用BRDF渲染
基本操作。但天鹅绒布料不是一个表面,不太合适。
布料:作为散射介质渲染
- 单独纤维的性质与分布转换为散射参数
- 当作散射介质渲染
布料:作为实际纤维渲染
如同毛发渲染。很好的效果,很大的计算量。
复杂外观
- 动机:渲染过于完美
闫:博士几年做了一点微小的贡献,大概是三件事:细节渲染是一个,毛发模型是一个,实时光追是一个
主要展示了下效果。原理听着大概是对于微表面模型的法线分布做了改进,取法线贴图一个周围区域内计算法线pdf,以避免朴素光追在微表面很难追踪到反射到光源的光路的尴尬。
近来潮流:波动光学
将光学卷到波动光学去。考虑光的干涉。涉及到复数域积分,跳过了实现未谈。效果确实很惊叹。例如磨砂铝表面放大看并不是纯白光,而是包含各种颜色杂光,但整体呈现白色。
程序化生成外观 Procedural Appearance
通过噪声函数实时生成纹理。
L19 摄像机、透镜与光场 Cameras, Lenses and Light Fields
独立话题。《现代摄影入门》。
成像 (Imaging) = 合成 (Synthesis) + 捕捉 (Capture)
- 为何相机需要透镜/小孔(pinhole)?
- 因为sensor收集记录irradiance,并不区分来源方向。去掉透镜/小孔后所有像素的irradiance相似(对各方向积分后的光照度结果)
- 针孔相机是光线追踪的模型
- 针孔相机的结果是没有景深的。各点成像结果都是锐利的。
焦距对视场的影响
对于固定的传感器尺寸,焦距减小,视场增大.$FOV = 2 \arctan(h/2f)$
因为历史原因,通常使用基于35mm胶片(36x24mm,即传感器尺寸)的镜头焦距指代视场角度。(即等效焦距)
- 17mm广角104°
- 50mm中焦47°
- 200mm长焦12°
曝光
- H = T x E
- 曝光 = 时间 x 辐射度
- 时间由快门(shutter)控制
- 辐射度影响因素
- 落到传感器单位面积上的光强
- 光圈(aperture)大小与焦距
ISO
简单理解为感光元件信号放大。线性成正比。
F-Number:曝光等级
焦距除以光圈直径。可通俗理解为光圈直径的倒数。
快门
- 一些基础的知识包括运动模糊
- 快门拉开过程速度的副作用:Rolling shutter
- 由于快门打开存在过程,导致实际照片各部分在不同的时间采样,高速运动物体出现扭曲
- PS:这其实不仅是机械快门的原因。电子快门而言CMOS按行写信息也会导致各像素采样时间的偏差
薄透镜的近似 Thin Lens Approximation
我们对现实情况做一个近似,不考虑透镜组以及复杂透镜的像差(aberrations,光线未聚焦到一点)情况。
- 理想薄透镜
- 所有进入透镜的平行光线穿过焦点
- 所有穿过焦点的光线在穿过透镜后平行
- 焦距可被任意改变(现实中透镜组可实现这一理想)
焦距、物距、相距关系,高斯薄透镜公式(Gaussian Thin Lens Equation)(初中物理回顾) $$ \frac{1}{f} = \frac{1}{z_i} + \frac{1}{z_o} $$
计算弥散圆尺寸 Computing Circle of Confusion (CoC) Size
透镜成像时存在一个焦平面,焦平面上的物体能清晰地成像在感光元件上。但远离焦平面的物体会成像在像平面前,从而最终打在感光元件上成为一个“弥散圆(Cricle of Confusion)”,圆内像素无法分辨光线的来路。 弥散圆尺寸与光圈大小成比例。$z_i$像距,$z_s$感光元件到透镜距离,$d^\prime$感光元件到像的距离。 $$ \frac{C}{A} = \frac{d^\prime}{z_i} = \frac{|z_s - z_i|}{z_i} $$
景深 Depth of Field
景深即为CoC足够小(e.g. 小于一像素)的一个成像平面范围。
L20 颜色与感知 Color and Perception
光场 Light Field / Lumigraph
全光函数 The Plenoptic Function
$$ P(\theta, \phi, \lambda, t, V_x, V_y, V_z) $$ 以此重建任意位置光场
光场是从任意位置向任意方向的光强度。四维表示。可以使用两个平面描述,各取一点确定一条光线。
光场相机
将像素替换为透镜,形成微透镜阵列(Microlens array MLA),记录光场(各个像素点上不同方向的光强)信息,从而可以通过计算后期重聚焦、调整光圈大小。
颜色的物理基础 Physical Basis of Color
- 光的电磁波性质
- 可见光光谱400nm - 700nm
谱功率密度 Spectral Power Distribution
光在不同波长的强度
颜色的生物基础 Biological Basis of Color
颜色是人类的一种感知。
- 感光细胞 Retinal Photoreceptor Cells
- 视杆细胞 Rods
- 在低光状态下的主要感知细胞 (scotopic conditions)
- 120M
- 感知灰度,不感知颜色
- 视锥细胞 Cones
- 在典型光照下的感知细胞(photopic)
- 6-7M
- 三种不同类型,分别对应三种不同光谱敏感性
- S:短波长,主要敏感红色
- M:中波长,主要敏感黄色
- L:长波长,主要敏感蓝色
- 提供颜色感知
- 视杆细胞 Rods
研究表明,每个人的视锥细胞类型分布很不一样。暗示每个人的看到的颜色并不一样,看到的世界也不一样。我多年的疑虑并不是多余的。
人最终感受到的是谱功率密度在三种视锥细胞上积分得到的结果(S, M, L)。
同色异谱 Metamerism
我们呈现颜色的基本原理。只要最终积分得到的结果(S, M, L)一样,我们就会看到一样的颜色,无需重现原本的谱功率密度的光。
颜色混合 Color Reproduction / Matching
加色 Additive Color
- 给定一组基础光,各有不同的光谱分布
- 调整这些光的亮度并相加
- 颜色便被三个标量描述
就是RGB了。
需要注意的是这里允许标量是负的,实际是在被测颜色中加上负标量对应量的分色。
色彩空间 Color Space
标准RGB sRGB
- 制作特定显示器RGB标准
- 其他颜色设备通过校准模拟该显示器
- 广泛使用
- 色域有限
全局色彩空间 CIE XYZ
- 一套人造的色彩标准,想象的标准色XYZ
- 不存在符合这套匹配函数的标准色
- Y是亮度 (Luminance)
- 设计目的
- 匹配函数严格正
- 覆盖所有可见光
Separating Luminance, Chromaticity
将XYZ归一化为xyz,固定Y,使用xy绘图描述色域。
CIE Chromaticity Diagram
色域中心为白色。
感知组织颜色空间 Perceptually Organized Color Space
- HSV颜色空间 Hue-Saturation-Value
- CIELAB Space
- 轴两端为互补色(互补色的两个实验很强很有意思,之前好像见得不多)
减色
CMYK,K黑色出于成本考虑。
L21 动画 Animation
顺序查看顺序图像产生运动效果。
- 一些常见帧率
- 电影:24fps
- 一般视频:30fps
- VR:90fps
关键帧动画
在keyframes中插值。
物理模拟 Physical Simulation
基于牛顿第二定律$F=ma$,使用数值模拟生成物体运动。
动态系统建模示例:质点弹簧系统 Example of Modeling a Dynamic System: Mass Spring System
一个简单的弹簧
理想弹簧$f_{a\rightarrow b} = k_s(b-a)$。引入原长使得弹簧本身有长度。
引入能量损失
理想弹簧会简谐运动不停。再引入摩擦力以避免弹簧永远震动。
一个简单的运动阻尼(motion damping) $f = -k_d \dot{b}$
- 表现为对运动的一个粘性拖拽(viscous drag on motion)
- 在速度方向上减慢运动
- 不足
- 会减慢所有的运动
- 弹簧落向地面,此时应该产生该阻尼么?
- 会减慢所有的运动
我们想要的阻尼应该只阻碍弹簧内部由弹性产生的运动。
- 该阻尼只由弹簧两端点相对速度决定
- 相对速度对阻尼大小的影响与相对速度的方向也有关
- 考虑以一端点为中心另一点做圆周运动,此时不应受阻尼影响
- 将相对速度做在弹簧上的投影以考虑弹簧的拉伸变化情况
改进得到一种适用的阻尼表达: $$ f_b = -k_d\frac{b-a}{\|b-a\|}(\dot{b} - \dot{a})\dot \frac{b-a}{\|b-a\|} $$
注意:这只是一种特定的阻尼类型。
弹簧组成结构
尝试用弹簧模拟布料。简单网格有以下缺陷:
- 无法抵抗切变(shear):对角拉扯会收缩
- 无法抵抗平面外的力:可以被完美对折
做以下改进:
- 对角线增加弹簧连接抵抗切变
- 通过间隔端点的弹簧连接抵抗对折
粒子系统
基础介绍
(正向)运动学 Forward Kinematics
- 被铰接的骨架 Articulated skeleton
- 拓扑 连接关系
- 连接关节的几何关系
- 树形结构
- 关节类型 joint types
- Pin 1维旋转
- Ball 2维旋转
- Prismatic joint 允许平移
- 优点
- 容易直接控制
- 实现简单
- 缺点
- 动画与物理现实不一致
- 对艺术家来说比较耗时
逆向运动学 Inverse Kinematics
已知端点位置,求解骨骼姿态。
一般N-link逆运动学问题的数值解法
- 选择初始配置
- 定义误差度量
- 计算误差梯度
- 应用梯度下降或牛顿法等优化方法求解
绑定 Rigging
对角色的一系列高阶控制,使得对姿态、变形、表情等控制更快速、更符合直觉。
形状调和 Blend Shapes
直接插值面而不是骨骼。如建模一系列面部表情。最简单的,线性组合顶点位置,使用样条(spline)控制各时间的权重。
动作捕捉 Motion Capture
- 优势
- 快速捕捉大量真实数据
- 高度真实感
- 劣势
- 复杂昂贵的场景
- 捕捉的动画可能不能满足艺术需要,需要调整
L22 动画 Animation (Cont.)
单粒子模拟 Single Paritcle Simulation
假设已知任意时间与位置的速度,即拥有一个速度场,可表示为$v(x,t)$。 可通过解一个一阶常微分方程(Ordinary Differential Equation ODE)得到粒子在不同时间的位置。
$$ \frac{dx}{dt} = \dot{x} = v(x, t) $$欧拉方法 Euler’s Method
又名前向欧拉,显式欧拉。
- 简单的迭代法
- 广泛运用
- 非常不准
- 大多数情况下不稳定
完全使用上一时刻的量来估计下一时刻的状态。误差会随着数值积分而累积。欧拉方法积分尤其不好。 这可以通过使用小步长来缓解。
考虑一个圆周速度场。完美情况下粒子作圆周运动。但任意步长下的显式欧拉方法都会使得例子向外螺旋飞出。 这表明显式欧拉法的误差存在正反馈,越来越大。 稳定性方面存在两个关键问题:
- 步长增加,精确度下降
- 不稳定性是一个常见、严重的问题导致模拟发散
误差与不稳定 Error and Instability
通过有限差分解决数值积分导致两种问题:
- 误差
- 误差随着迭代累积,精确度越来越低
- 误差在图形学应用可能并不关键
- 不稳定性
- 误差会复合(compound),导致模拟发散,尽管真实系统并不会
- 缺少稳定性是基础问题,不可忽视
对抗不稳定 Combat Instability
中点法 Midpoint Method
- 计算欧拉步骤(Euler step)
- 在欧拉步骤的中点计算导数(derivative)
- 使用中点导数更新位置
自适应步长 Adaptive Step Size
- 基于误差估计选择步长的技术
- 非常实用
- 可能会需要很小的步长
重复以下步骤直到误差小于阈值:
- 计算欧拉方法步骤,步长T
- 计算两次欧拉方法步骤,步长T/2
- 计算以上两次结果误差
- 如果误差大于阈值则减小步长并重试
隐式欧拉方法 Implicit Euler Method
使用下一时刻的速度与加速度来计算当前步骤。使用解析解或牛顿法求解。提供很好的稳定性。 $$ x^{t+\Delta t} = x^t + \Delta t\dot{x}^{t+\Delta t} \\ \dot{x}^{t+\Delta t} = \dot{x}^t + \Delta t \ddot{x}^{t+\Delta t} $$
衡量稳定性
- 衡量方法
- 局部截断误差(local truncation error):每一步的误差
- 整体累计误差(total accumulated error):整体误差
- 绝对数值并不重要,阶(order)是需要关心的
- 隐式欧拉法拥有1阶误差
- 局部截断误差$O(h^2)$
- 全局累积误差$O(h)$
- h指步长
- 意味着步长减半,全局误差减半
龙格库塔方法 Runge-Kutta Families
指一类解决常微分方程的高阶方法
- 非常善于处理非线性
- 四阶版本被广泛使用,即RK4
初始情况 $$ \frac{dy}{dt} = f(t, y),\ y(t_0) = y_0 $$
RK4 solution $$ y_{n+1} = y_n + \frac{1}{6}h(k_1 + 2k_2 + 2k_3 + k_4) \\ t_{n+1} = t_n + h $$
where $$ \begin{aligned} k_1 = f(t_n, y_n) \\ k_2 = f(t_n + \frac{h}{2}, y_n + h \frac{k_1}{2}) \\ k_3 = f(t_n + \frac{h}{2}, y_n + h \frac{k_2}{2}) \\ k_4 = f(t_n + h, y_n + hk_3) \end{aligned} $$
基于位置的/魏莱积分 Position-Based / Verlet Integration
- 思想
- 在改进欧拉法之后,约束粒子位置来防止发散、不稳定行为
- 使用约束位置来计算速度
- 这些思想都会损失能量,稳定
- 优缺点
- 快速简便
- 不基于物理,损失能量导致误差
刚体模拟 Rigid Body Simulation
- 类似粒子模拟
- 只需要多考虑一些属性
- X: 位置
- $\theta$:旋转角度 (rotation angle)
- $\omega$:角速度 (angular velocity)
- F:力
- $\Gamma$:扭矩 (torque)
- I: 转动惯量 (momentum of inertia)
流体模拟 Fluid Simulation
Position-Based Method
不是基于物理的模型 关键思想:
- 认为水由刚体小球组成
- 假设水不可压缩
- 任何位置小球密度的改变需要被通过改变粒子位置“修正”
- 需要知道任意位置的密度梯度,该梯度与粒子位置有关
- 通过梯度下降更新
拉格朗日方法与欧拉方法 Eulerian vs. Lagrangian
又见面了。草草地复习。
- 拉格朗日质点法
- 欧拉网格法
物质点法 Material Point Method (MPM)
混合方法,结合欧拉法与拉格朗日法。
- 拉格朗日部分:认为粒子携带物质属性
- 欧拉部分:使用网格进行数值积分
- 交互:粒子转移属性到网格,网格更新后插值回粒子
完结
张无忌学完之后,张三丰问:还记得吗?
张无忌答:全都记得
过了一会又问:现在呢?
无忌答:已经忘却了一小半。
又一会,答:啊,已经忘了一大半。
到最后:已经全都忘了,忘得干干净净。
回到一切的开始。计算机图形学大致四部分内容:
- 光栅化
- 几何
- 光线传播
- 动画/仿真
光栅化的内容教得差不多了。几何的路还很长。光线传播后面还有课可以听,包括实时光线追踪。仿真之后有胡的课,猜测应该是和胡的work太极关系紧密。看着太极起步到发展,效果确实很好,给GPU编程搭了类似Python的普及化桥梁,做了各种优化,感觉很适合上手,但不知道工业应用怎么样。
路漫漫其修远兮。